光线追踪,基本思想是从摄像机的位置向屏幕发射光线,然后检测在场景中是否和物体相交
实现思路
- 设置参数搭建场景
- 发射光线,检测是否和物体相交
- 计算最终颜色
因为需要先了解如何检测相交才能决定需要哪些参数,所以先看下如何检测相交
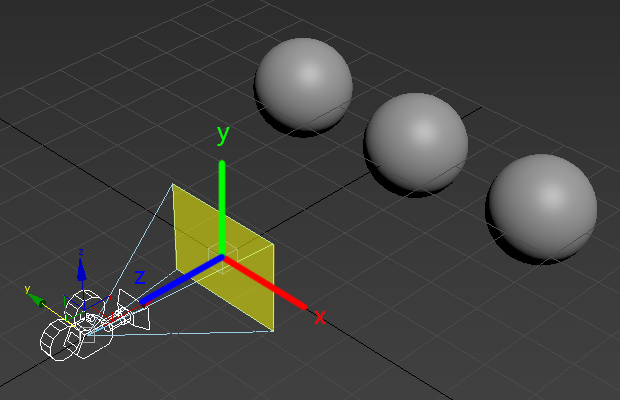
本文坐标系如下,不涉及空间转换
注意: 屏幕坐标系的Z轴正方向应该是垂直于屏幕向里,和图上相反
但是因为后面的光照模型是直接搬的别人的代码,光源位置在轴向向外的情况下显示正常
所以就按照Z轴向外放置摄像机和场景了
如何检测相交
如何检测和球体相交
光线可以用 $ ro+t*rd $ 来表示 ( 光线起始位置 + 长度 * 单位方向向量 )
同时,在球面上的每一点到球心的距离都等于球的半径
所以光线和球的交点必定满足$ | ro + t*rd - center |= R $( $ ro, rd, center $都是$ vec3 $ )
为了避免开方的计算,我们把两边都平方,得到$ ( ro + t*rd - center )^2 = R^2 $
这里面$ ro $是摄像机的位置,$ rd $是光线方向,$ center $是球心坐标,$ R $是球的半径
只有$ t $是未知的,是我们需要求解的变量,如果$ t $有解,说明光线和球体相交
重新整理等式,$ [ rd*t + ( ro - center )]^2 = R^2$
展开为$ rd^2t^2 + 2rd( ro - center )t + (ro - center)^2 - R^2 = 0 $
因为$ rd $是单位向量,所以$ rd^2 = 1 $
=> $ t^2 + 2rd( ro - center )t + (ro - center)^2 - R^2 = 0 $
总所周知,一元二次方程的求解公式 $ x = \frac { -b ± \sqrt{b^2-4ac} } { 2a } $
if $ b^2-4ac < 0 $, 无解
1 | //sph.xyz: center, sph.w: radius |
如何检测和平面相交
注意这里是指无限大的平面,不是有边界的矩形
我们需要的是xz方向的平面,平面上任意一点可以表示为(0,h,0)
如果相交,光线和平面的交点$P$到平面上任意一点$P_0$的向量必定和平面法线$n$垂直
也就是$PP_0 ·n = 0$
=> $ [ro+t*rd - (0,h,0)] * (0,1,0) = 0 $, 得到 $ t = \frac{h - ro.y}{rd.y} $
1 | float iPlane(in vec3 ro, in vec3 rd, in float h) |
设置参数搭建场景
了解如何检测相交之后,我们就知道了要提供哪些参数
$ ro $:摄像机的位置,$ rd $:光线方向,$ center $:球心坐标,$ R $:球的半径
如图所示,$ rd $的集合其实就是这个摄像机视锥,反映了焦距,FOV等
而$ ro $其实是前后移动摄像机以及视锥,等于摄像机和视锥不动,物体前后移动
并不影响透视,镜头拉伸等效果
把屏幕坐标转换到[-1,1],乘以屏幕长宽比确保不会拉伸,这个就是视锥底面的尺寸
1 | vec2 uv = (fragCoord * 2.0 - iResolution.xy ) / iResolution.y |
而视锥的长度,即$ rd.z $代表了相机的焦距,会影响到最终画面的透视效果
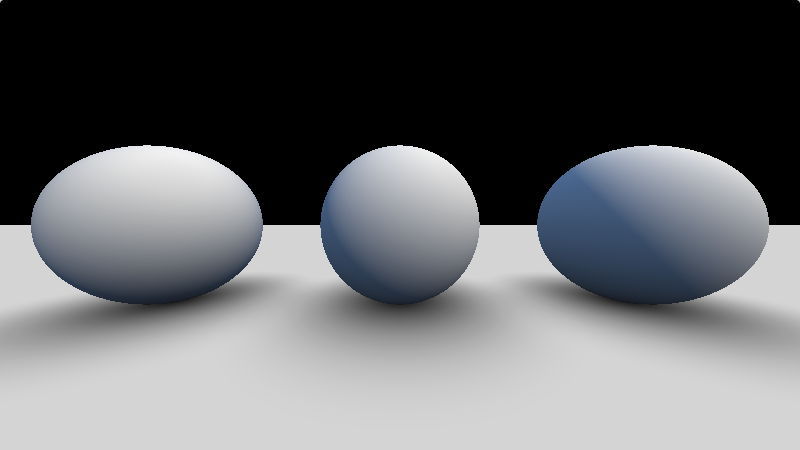
这里的2.14是根据Jqx1991的回答模拟人眼透视
视锥角度为25°, 屏幕高度为1,$ \frac {1}{tan25°} ≈ 2.14 $
调节$ rd.z $可以看到透视慢慢转向广角镜头或者鱼眼镜头的效果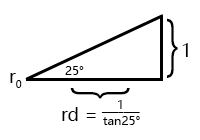
1 | vec3 rd = normalize( vec3(uv, -2.14) ) |
定义球比较简单,$ xyz $是球心坐标,$ w $是半径
1 | vec4 s1 = vec4( 0.0, 0.0, -5.0, 1.0 ) |
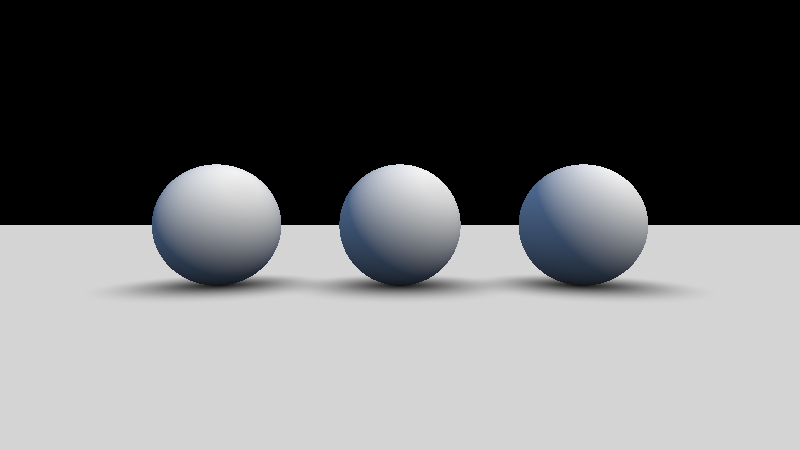
计算最终颜色
前面检测相交的函数返回了$ t $
因为是从摄像机发出光线射向屏幕,所以交点一定是在摄像机前面,即$ t >0 $
光线和三个球体以及平面分别进行相交检测,然后得到最小的$ t $值即最近的交点
最开始说过,光线用 $ ro+t*rd $ 来表示,得到$ t $之后代入,得到交点的坐标信息
球体的法线就是从球心到交点向外,平面的法线就是竖直向上
然后进行光照计算得到最终结果,这里直接采用了EKnapik的代码