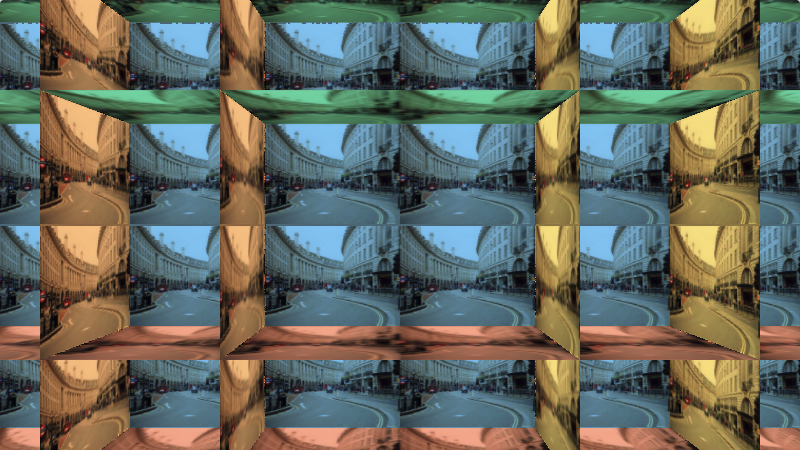
Interior Mapping是一种伪造室内场景的实时渲染技术
不需要建模,在一个平面上就可以渲染出房间的体积感
这里是该技术开发者的博客,里面有paper及demo
需要了解光线追踪的基础知识,可以看我上一篇或者Scratchapixel
实际应用中有两种思路,一种是生成单个房间,然后在房间内划分区域
另一种是将房间拆分成xyz三个方向的平面,本文实现的是这种
实现思路
- 设置参数搭建场景
- 发射光线,检测是否和物体相交
- 计算最终颜色
如何检测相交
首先只考虑xz方向的平面,平面上任意一点可以表示为(0,h,0)
如何检测和平面相交在前一篇里说过了,$ t = \frac{h - ro.y}{rd.y} $
假设两个平面之间间隔为$d$,那么平面的位置$h$可以表示为$n * d$( $n$为任意整数)
但是因为平面是无限延伸的,如果直接做检测相交,光线碰到的永远只有最近的两个平面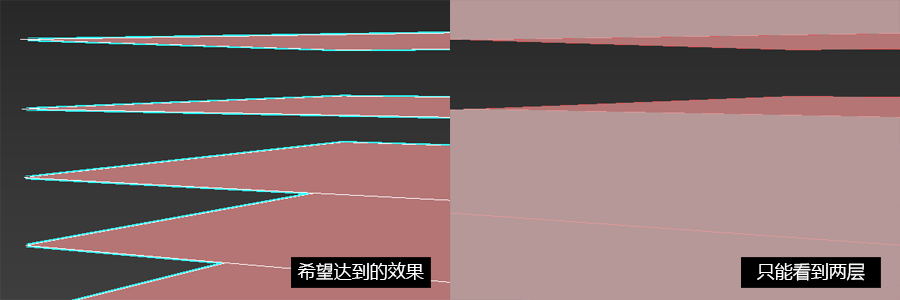
所以我们需要判断每个像素应该对应的平面坐标$h$,而不是找到最近的相交平面
当摄像机是仰视的时候,我们看到的是高于像素的天花板
当摄像机是俯视的时候,我们看到的是低于像素的地板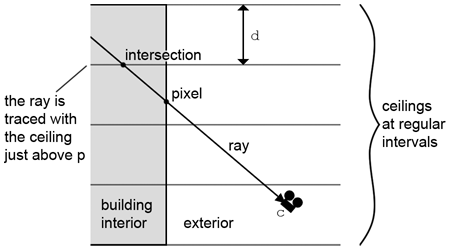
那么我们可以通过判断$rd$的方向来确认是需要向上取整还是向下取整得到$h$
1 | vec2 intersect(in vec3 ro, in vec3 rd, in vec3 Axis, in float d, in float id1, in float id2) |
对三个轴向都完成相交检测后,比较得到最近的$t$,完成相交检测
1 | vec2 nearest(in vec2 c1,in vec2 c2,in vec2 c3) |
设置参数搭建场景
基本跟上一篇一致,构造正确的摄像机视锥
计算最终颜色
把坐标位置换算成uv,读取贴图得到最终颜色